
PID算法是上个世纪30年代左右提出的控制算法,大至航空航天、小至家庭温度调控都可以使用PID算法,虽然PID算法从提出到现在已经历经了快一个世纪,其后也出现了很多现代的算法,比如蒙特卡洛、智能控制等等,但现在PID仍然经久不衰,可以说目前80%以上的控制仍然使用PID算法。
PID算法是自动控制原理课程学习的一部分,但在课程中老师讲解的是最基本的原理,没有任何拓展,更别提应用了,首先,先简单说一下PID控制算法的原理。
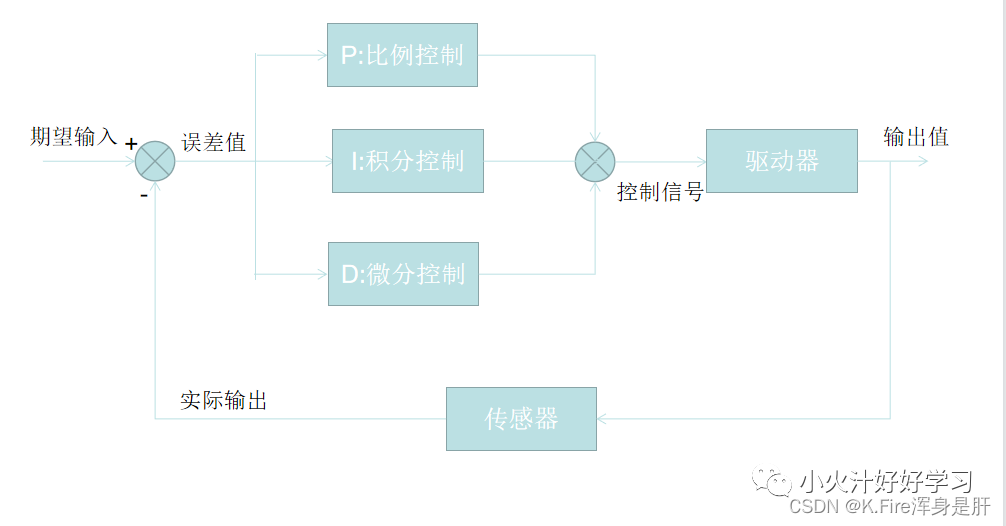
上图为PID算法的控制框图,在我们控制电机速度时,期望输入就是电机的期望速度值,期望输入与由编码器测得的实际速度作差,求出的误差值传给PID的控制部分,算出需要输出的控制信号,将该控制信号传给,也就是输出给电机驱动板L298N,这样形成一个循环,就实现了对电机速度的精准控制。

但是在计算机中计算机很难实现连续型变量的积分或者微分操作,因此在计算机中,我们使用离散型的积分和微分,就是取时间间隔T为1,离散型PID公式如下:

在电机的速度PID控制算法中,因为我们一般使用PI算法就够了,所以我们可以使用增量式PID算法,这样可以让我们的公式和代码更加简洁。

因为积分的效果是累加,随着时间的推移,积分项的值会升到很高,积分本来的作用是用来减小静态误差,但积分项过大会引起过大的震荡,所以我们可以加一个判断函数if,当积分项的值达到一定值后,就让积分项保持这个值,避免引起更大的震荡。
如果刚开始的误差比较大,那么积分项则会在刚开始就累计到了一个很大的数值,那么当第一次实际输出达到期望值时,不会立刻停止,而是会产生一个很大的过冲。这时就需要用到积分分离,就是当误差值过大时,我们就不使用积分项,只让PD项单独作用,当误差值较小后,再加入积分项,以减小静态误差。
当编码器的定时器,每隔10ms反馈一次编码器测出的实际速度后,调用PID函数,求解输出给电机驱动板的PWM值,然后通过Set_Pwm函数进行设置,以此控制电机转速。
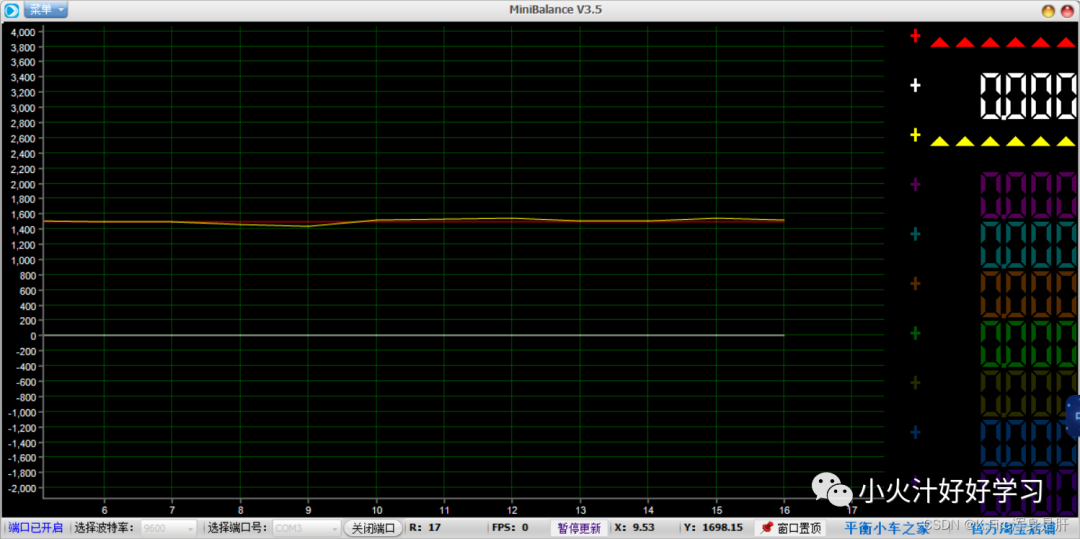
对于PID算法这才是万里长征的第一步吧,想要调出完美的控制程序,还需要复杂的PID参数整定,这里可以配合上位机进行调试。