
导体受力的方向用左手定则确定。这一对电磁力形成了作用于电枢一个力矩,这个力矩在旋转电机里称为电磁转矩,转矩的方向是逆时针方向,企图使电枢逆时针方向转动。如果此电磁转矩能够克服电枢上的阻转矩(例如由摩擦引起的阻转矩以及负载转矩),电枢就能按逆时针方向旋转起来。
直流发电机的工作原理就是把电枢线圈中感应的交变电动势,靠换向器配合电刷的换向作用,使之从电刷端引出时变为直流电动势的原理。
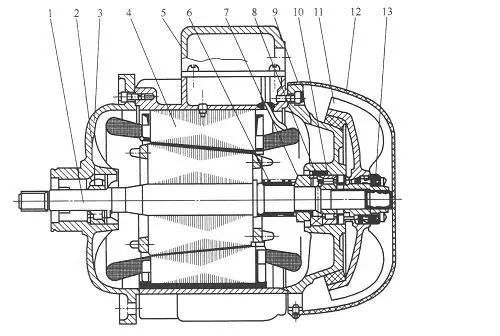
缺点:由于电刷和换向器的存在,有刷电机的结构复杂,可靠性差,故障多,维护工作量大,寿命短,换向火花易产生电磁干扰。
ping Motor步进电机就是一种将电脉冲转化为角位移的执行机构;更通俗一点讲:当步进驱动器
信号,它就驱动步进电机按设定的方向转动一个固定的角度。我们可以通过控制脉冲的个数来控制电机的角位移量,从而达到精确定位的目的;同时还可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。选型要注意步距角、扭矩力、多少相电机
优点:控制简单,低速扭矩大,成本低;缺点:步进电机存在空载启动频率,所以步进电机可以低速正常运转,但若高于一定速度时就无法启动,并伴有尖锐的啸叫声;同时,步进电机是开环控制,控制精度和速度都没有
电机一般还有一个 最小启动电压 ,就是可以使得电机(无负载)、开始旋转的电压值。为保证电机正常工作,一般需要接到电机两端的电压值范围为:最小启动电压至额定电压。并且在这个电压值范围内才认为转速与电压成正比。
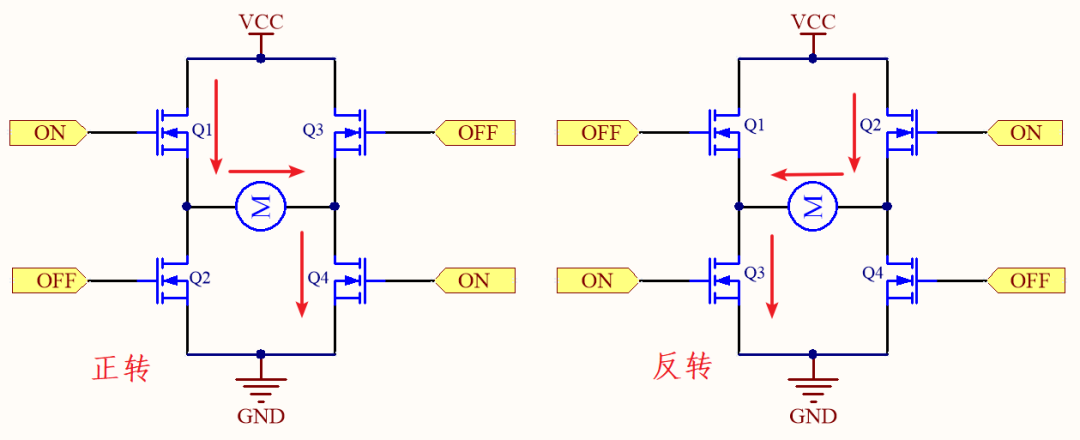
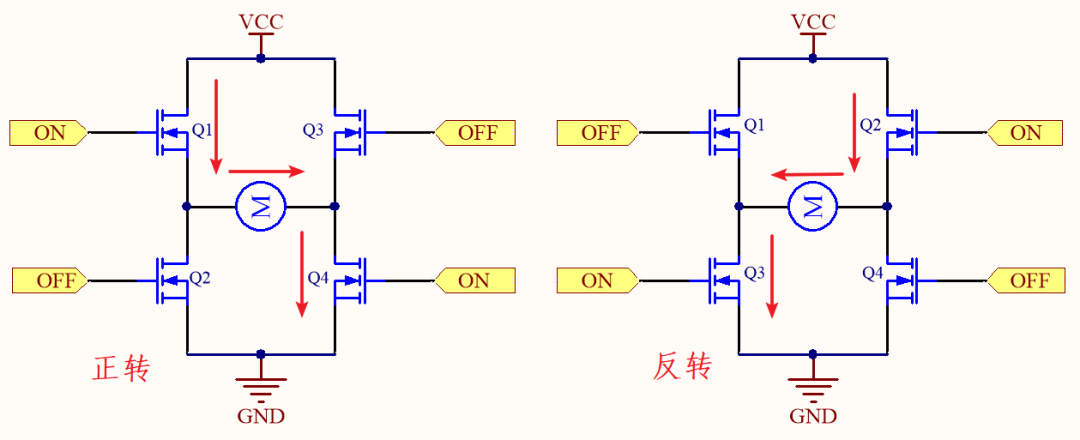
以MOS管搭建的H桥电路解释电机正反转控制。要使电机运转,必须使对角线上的一对MOS管导通。如下图,当Q1管和Q4管导通时(此时必须保Q2和Q3关断),电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。另一对MOS管2相Q3导通的时候(此时必须保证Q1和Q4关断),电流从右至左流过电机,从而驱动电机沿逆时针方向转动。驱动电机时,保证H桥两个同侧的MOS管不会同时导通非常重要,如果MOS管Q1和Q2同时导通,那么电流就会从电源正极穿过两个MOS管直接回到负极,此时电路中除了MOS管外没有任何负载,因此电路上的电流就达到最大值,烧坏MOS管和电源。Q3和Q4同时导通是同样的道理。
驱动电机时,保证H桥两个同侧的MOS管不会同时导通非常重要,如果MOS管Q1和Q2同时导通,那么电流就会从电源正极穿过两个MOS管直接回到负极,此时电路中除了MOS管外没有任何负载,因此电路上的电流就达到最大值,烧坏MS管和电源。Q3和Q4同时导通是同样的道理。
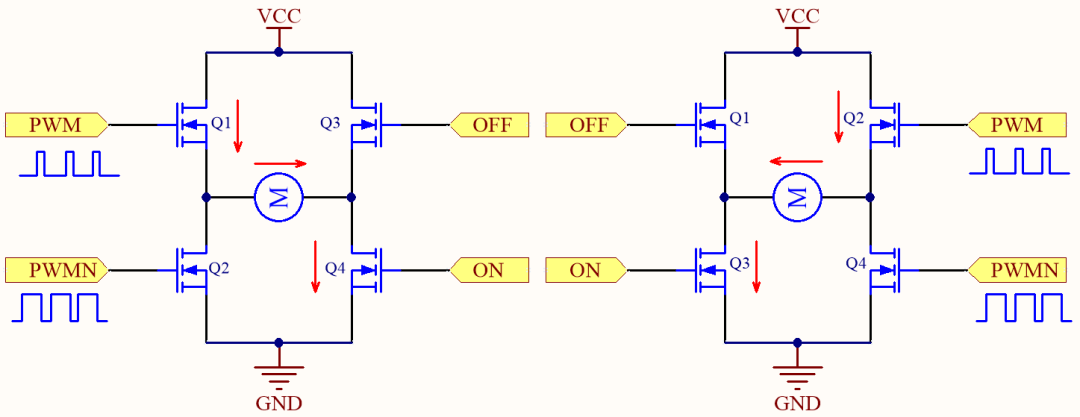
简单的开关只能控制电机正反转,引入PWM控制可以实现方向和速度调节。调节占空比实现控速,占空比越大平均电压(电流)越大,速度越快PWM频率一般在10KHz~20KHz之间。频率太低会导致电机转速过低,噪声较大。频率太高,会因为MOS管的开关损耗而降低系统的效率。
缺点:不能刹车,不能能耗制动,在负载超过设定速度时不能提供向力矩。调速静差大,调速性能很差,稳定性也不好。02
PWM和PWMN是互补的PWM信号,一般用高级控制定时器的通道和互补通道控制。在PWM为高电平时:MOS管1和4都导通,MOS管2和3都截止,电流从电源正极,经过MOS管1,从左到右流过电机、然后经过MOS管4流入电源负极。在PWM为低电平时:MOS管2和4都导通,MOS管1和3都截止,根据楞次定律,存在自感电动势,电流还是从左到右流过电机,经过MOS管4和MOS管2形成电流回路。03
PWM1和PWM1N、PWM2和PWM2N是PWM互补通道。使用高级控制定时器通道和互补通道控制双极模式中,PWM1和PWM2周期相同,占空比相同,极性相反,使得对角线上的两个MOS管同时导通,同时关断。