
手术机器人,作为医疗机器人的重要子领域,融合了临床医学、生物力学、机械学、计算机科学以及微电子学等多个学科和高新技术,主要应用于手术影像导航定位及微创手术领域。
一般而言,手术机器人系统由医生操作台、机器人手术臂系统以及三维成像系统三大组成部分。外科医生可以通过三维成像系统在离开手术台的同时观察病变情况,并操纵操控杆驱动手术台上的械臂进行精细的手术操作。此项技术的应用,不仅成功解决了传统开放式手术中的定位不精确、手术时长过长及三维高清图像视野缺失等问题,而且其手术效果更优、术后创伤更小、出血量更少且康复速度更快。
目前,手术机器人的研究和应用已经非常的广泛。在临床上,用机器人开展手术基本以及覆盖了全部外科领域,像在普通外科、心脏外科、泌尿外科、妇科、耳鼻喉科、整形外科、神经外科和骨科等都有很好的应用案例。

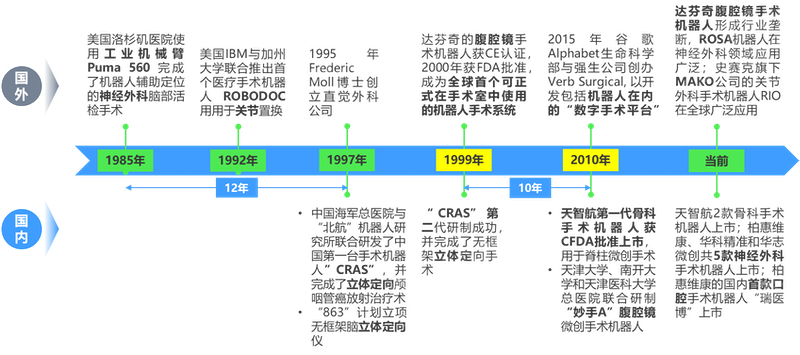
手术机器人的发展历史可以追溯到20世纪80年代。最早的手术机器人系统是1985年在美国斯坦福大学研发的,名为”Arthrobot”,用于进行骨科手术。然而,Arthrobot需要由两名医生同时操作,而且比传统的手术方法更为复杂和耗时。
1990年代,手术机器人的发展进入了一个新的阶段,当时的设备已经可以由一名医生独立操作,而且手术过程更为精确和安全。比如,1992年的”ROBODOC”和1994年的”ZEUS”手术机器人。
2000年,美国食品药品监督管理局(FDA)批准了”达芬奇”手术系统,这是第一个得到FDA批准的手术机器人系统,也是目前最广泛使用的手术机器人系统之一。”达芬奇”手术系统的成功在很大程度上推动了手术机器人行业的发展。
中国的手术机器人行业发展相较于国际先进水平起步稍晚。1997年,我国研制成功首台手术机器人,然而直至2006年,才引进第一台达芬奇机器人。2021年标志着中国医疗机器人发展的重要里程碑,我国成功注册首台自主研发的医疗机器人,从此揭开了医疗机器人高速发展的新篇章。到2022年,我国已有多款康复机器人和手术机器人顺利完成注册,显示出医疗机器人行业的快速崛起和发展势头。
近年来,手术机器人行业的发展趋势是朝着更高的精度、更大的灵活性、更广泛的应用领域和更多的个性化选项方向发展。例如,有些手术机器人可以在没有人工干预的情况下自动完成手术。此外,手术机器人的应用领域也在不断扩大,从原来的泌尿科和妇科手术扩展到了心脏手术、神经外科手术等更多领域。作为医疗领域的一项性创新,手术机器人在技术不断成熟的驱动下,有望引领行业的发展新潮。
根据 ReportLinker 发布的“2023年手术机器人全球市场报告”数据,全球手术机器人市场预计将从2022年的56.8亿美元增长到2023年的66.8亿美元,复合年增长率(CAGR)为17.8%。由于俄罗斯-乌克兰战争的影响,全球经济的短期恢复受到了影响,导致多个国家受到经济制裁,大宗商品价格上涨,供应链中断,造成了商品和服务的通货膨胀,并影响了全球许多市场。预计到2027年,手术机器人市场将达到127.3亿美元,复合年增长率为17.5%。
技术进步是手术机器人市场中越来越流行的一个关键趋势。手术机器人行业的主要公司正在专注于开发新技术,以提高患者的疗效并巩固他们在市场上的地位。例如,2021年11月,英国的医疗设备制造公司Smith+Nephew推出了CORI手持机器人,这是一种用于全膝和部分膝关节置换手术的一站式机器人辅助手术系统。它配备了一个3D术中成像系统和机器人雕刻工具,使医生能够测量、计划和进行膝关节手术。该系统是一个紧凑且完全移动的解决方案,设置时间最少,并可以从一个手术室移动到另一个手术室,以优化手术单位的患者流动。
2023年2月,美国的ARCH医疗解决方案公司收购了Bettanini’s Custom Manufacturing,这是一个基于美国的精密机加工组件制造商,包括手术机器人组件。这次收购增强和扩大了向行业领先的OEM提供精密制造的能力和产品范围。

2022年,北美是手术机器人市场最大的地区。预计亚太地区将在预测期内增长最快。中国手术机器人市场发展较晚,目前仍以进口手术机器人为主,中国有着患者众多,机器人使用频次高的特点,随着手术机器人的普及以及各类国产手术机器人的出现,中国手术机器人市场规模将持续增长,在2026年将会达到384亿美元,复合增长率为35.6%远高于全球手术机器人市场规模增速。
手术机器人的产业链主要分为上游的原材料、核心零部件,中游的机身组装、系统集成和软件开发等环节,以及下游的终端使用环节。其中技术壁垒最高的产业链环节是处于产业链上游的三大核心零部件,即伺服电系统、减速器和,其市场主要由美国、德国和日本垄断,我国仅能够在领域实现自产。此外,从产品附加值上看,在机器人成本构成中,减速器、伺服系统、分别占35%、20%、15%,三大核心零部件的成本占比达到了70%。
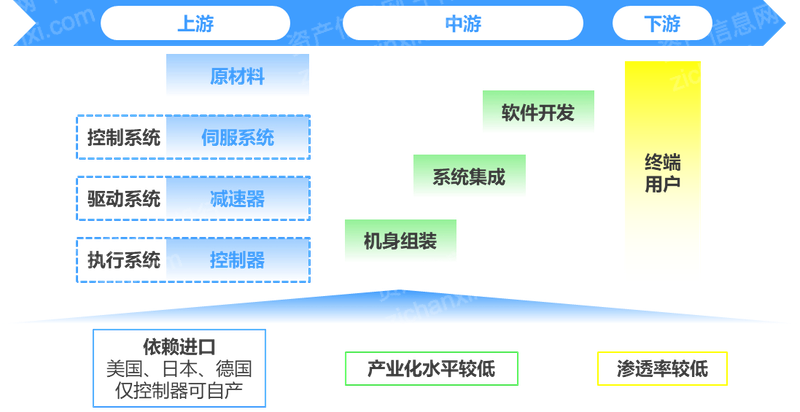
手术机器人的上游主要是制造手术机器人的原材料,以及内部控制系统、驱动系统和执行系统的核心伺服系统、减速器、。然而我国手术机器人行业上游的三大核心零部件仅有可实现自产,伺服系统和仍以进口为主,成为手术机器人领域的“卡脖子环节”,并且短时间内仍然难以与国际顶尖企业比肩,同时这也是整个机器人行业最难攻克的技术难题。
伺服系统由伺服电机、编码器和伺服驱动组成,主要为机器人的运动提供动力并完成机器人运动。伺服系统是一种以机械位置或角度作为控制对象的自动控制系统,除了可以进行速度与转矩控制外,还可以进行精确、快速、稳定的位置控制。
伺服电机主要布置于机器人运动关节之中,在手术机器人中主要以直流电机为主,其优点是功率更大;编码器安装于电机输出轴,与电机同步旋转,转动的同时将信号传达至驱动器;驱动器根据信号判断伺服电机的转向、转速、位置是否正确,然后进行修正调整,根据指令发出相应控制电流。

直流伺服电机:只需接通直流电即可工作,控制特别简单。具有启动转矩大、体积小、重量轻、转速和转矩容易控制、效率高等优点。但是需要定时维护和更换电刷,具有使用寿命短、噪声大等不足。
步进电机:直接用数字信号进行控制,与计算机的接口比较容易。没有电刷、维护方便、寿命长。启动、停止、正转、反转容易控制。但是存在能量转换效率低、易失步等缺点。
目前应用于手术机器人的伺服电机仍然以外国品牌为主,包括德国西门子、瑞士Maxon Motor、日本松下、美国科尔摩根等。其中,欧系伺服系统特点是过载能力高,动态响应好,驱动器开放性强,且具有总线接口,但价格昂贵,体积重量大。日本松下公司推出的小型交流伺服电动机和驱动器颇受市场欢迎。
我国的伺服电机产品在高性能、高可靠性方面与国际品牌存在差距,主要表现在缺乏大功率产品、不够小型化、信号接插件不稳定、编码器精度不足等,此外在核心技术方面当前我国使用的高精度编码器,尤其机器人上用的多圈绝对值编码器严重依赖进口,因此短期内我国在手术机器人领域的伺服电机仍需依赖进口。
减速器是精密机械工业的巅峰产品之一,由高精度的圆肩、齿轮相互啮合,对材料科学、精密加工设备加工精度、装配技术和高精度检测技术都有极高的要求。
机器人减速器用于提高机器人的动作精确度,由于提供动力的伺服电机转速很高,通常与手术机器人的应用场景不匹配,这就需要减速器来使输出转速降下来,并且在每一个电机处都要配套使用一个减速器。减速器对于机器人的性能、精度和寿命都起着决定性的作用,在手术机器人领域所使用的产品是以“RV(Rotate Vector旋转矢量)减速器”和“谐波减速器”为代表的,具有结构紧凑、传递功率大、噪声低、传动平稳等特征,在制造上具有很高的技术壁垒。

当前全球75%的市场被日本的纳博特斯克(Nabtesco)和哈默纳科(Harmonica Drive)占据,其中Nabtesco垄断了RV减速器市场,Harmonica Drive垄断了谐波减速器市场,剩余25%的市场由德国、意大利和美国瓜分。
目前我国已有国产的RV减速器上市,在性能指标上短期可以达到要求,但是由于质量控制和制造工艺等问题,国产产品很容易磨损报废,使用寿命太短,因此鲜少被企业选用,我国的手术机器人企业仍然高度依赖进口减速器产品。从技术上看,1980年Nabtesco公司开始RV减速器的设计,1986年取得实质性突破,到90年代实现产业化,而我国是在 “十二五”期间才将纳入重点发展领域的,因此我国的RV减速器的行业发展水平相较于日本滞后至少25年。
是手术机器人最为核心的零部件,相当于机器人的“大脑”,负责接收各组元信号,并向机器人发布和传递动作指令,对机器人性能具有决定性影响,通常来说机器人的活动的自由度越高,对的性能要求就越高。
由硬件和软件两部分组成,其中硬件就是运动控制卡,包括一些主控单元、信号处理等部分;软件主要包括控制算法、二次开发等。手术机器人企业通常会对进行自主研发,以保证机器人的稳定性和技术体系,因此相比于减速器和伺服电机,国产机器人产品与国外差距较小,但在稳定性、响应速度和二次开发平台的易用性开发方面有待进一步升级。
中游环节除机身组装外,主要包括系统集成和软件开发。其中系统集成主要是根据客户需求完成机器人的组装和调试,相比于核心零部件的设计制造,该环节技术难度较低,企业的议价能力较强。软件开发环节是手术机器人企业核心竞争力的体现,最体现开发者的设计能力,考验开发者对各学科的综合理解能力。

中游环节,我国手术机器人企业约滞后国际先进水平10年左右,当前正处于企业与高校、医院联合开发到企业主导产业化的过渡阶段,行业已经形成明显的产学研医结合的特征,头部企业的手术机器人产品多由高校科研成果转化而来,如天智航、柏惠威康、思哲睿等,但受技术缺陷、管理应用和使用成本三大因素制约,国产手术机器人产业化水平仍然较低。其中腔镜机器人在中国手术机器人市场中占比最。