
主体全手工制作,由15种零件,合共25件零件构成,其中包括3根规格不同的轴,2种规格不同的轴承合计5个,支架1种合共2件,支座1种合共1件,第一级1种合共2件,第二级机械臂1种合共2件,第机械臂1种合计2件,机械臂间连接件3种共4件,轴固定件2种合计4件,另有用于各个零件间固定的角铁合计8件。其中除轴承外均为铝合金制件,机械臂手臂部分由平行铝合金板构成双立式结构,第机械臂共有两边,分别可自由活动,其由单块铝合金板组成,一端直接与舵机相连,另一端固定鼓棒。轴分为竖直轴与水平轴,竖直轴与步进电机相套,水平轴由轴固定件与轴承分别连接各级机械臂。
整体呈现单支双臂式结构,合共有5个自由度,其中3个自由度有电机驱动,其中位于底座下方的步进电机用于转动,而位于第二级与第机械臂之间连接的舵机用于带动第机械臂转动。铝合金板零件之间使用自制淬火角铁进行固定,避免对铝合金制件进行钣金工作,以减低成本和制作时间;轴与铝合金工件之间采用轴连接件与轴承混合固定的方式进行配合与固定。整体机械臂合共使用了将近200g的螺丝与螺母,主要用于角铁与铝合金板件的紧固处理,另外也有使用少量紧固螺钉进行轴与固定件或者电机之间的固定。舵机上面也装有四个带有齿孔的固定件,用于夹持第机械臂。(详见图1.1)

机器人底座由2块平行有机玻璃构成,其中由4根螺柱连接2块玻璃板。面板装有轴承,通过轴承自带的小孔与有机玻璃地板进行螺丝固定。底板通过角铁夹住步进电机,使步进电机自身不能转动,竖直轴穿过轴承与步进电机相连,竖直轴底部为空心处理,并且使电机轴套入竖直轴中,并使用紧固螺钉进行两者的固定。面板同时有9根固定螺钉,用于支撑鼓。2块底板之间的空间用于放置主控制电路电路板PIC,步进电机驱动及其中一个电源。(详见图1.2及1.3)


整个机器人的电路系统由3个主要部分组成分别为由PIC组成的主控制电路,由声音传感器触碰开关组成的子控制电路,以及由单片机控制的电机及其配套电路,其中电机及其配套电路又细分为舵机的直接控制与使用步进电机驱动电路进行对步进电机的控制。
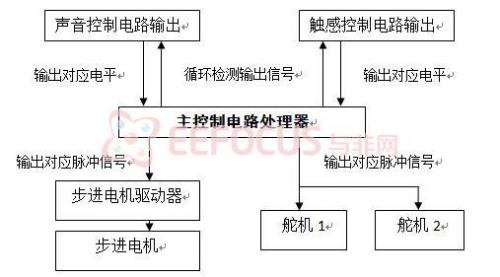
机器人主控制电路由开发板和最小系统板组成,开发板主要构造包括有PIC单片机,时钟电路系统,蜂鸣器电路,复位电路系统,配套的LED灯显示系统,数字显示系统,外接数据线V电压电源系统相连,向主控制电路提供稳定的电压。利用主控制电路上的排针设备,可以使用电路连接线连接各个子控制电路、舵机与步进电机驱动器的相关接口,通过主控制电路接收子控制电路的反馈信息,通过对应的判断向舵机、步进电机输出相应的脉冲,控制电机运动。其控制流程如下:
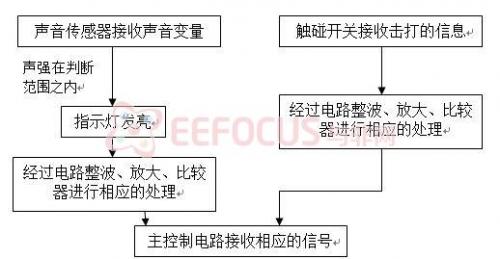
机器人子控制电路由手工制作的电路板组成,其中子控制电路又分为声控子电路与触控子电路;其中声控电路部分主要由声音传感器及指示灯系统构成,能够接收环境变量中的声音分量,通过调节可变电阻可以使声音传感器接收合适范围的声强,并通过整波电路与放大电路将相关的信息传递到单片机中;触控电路主要部分由触碰开关构成,触碰开关将在设计中外接,通过击打触碰开关,使开关通过电流,通过电流后整体经过各类比较器、放大器、整波元件实现向PIC单片机输出有高电平经过的信息功能。其控制流程如下所示:
步进电机驱动电路为现成集成模块,外部与15V电压相连,逻辑电源接单片机VCC,通过单片机输出脉冲实现一定角速度转动,同时由DIR(方向)接口决定步进电机转动方向,FREE(使能)接口决定步进电机的启动与停止速度。
机器人通过第机械臂及其连接的鼓棒实现击鼓的功能,其中第机械臂由舵机带动,调节舵机的高低电平延时时间实现对舵机的转速、击打力度的控制,通过高低电平输出的循环实现转角的控制,同时调用相关的程序,使机器人可以按照一定的节奏或者现场示教人员的指示进行有规律的击鼓动作。
如下图所示,机器人当给予舵机延时2400us的高电平以及20ms低电平的脉冲信号(详见图3.5)并且将该程序循环40次,舵机会从图1.9所示位置A移动到图1.10位置B,同时通过第机械臂、舵机自身、鼓棒形成一个结构,击打鼓,使鼓发出一定的响声;而当给予舵机延时600us的高电平以及20ms低电平的脉冲信号(详见图3.7)并且将该程序循环40次,舵机会从图1.6所示位置回复到图1.5所示位置,并且通过其自身的机械零点进行回复。
通过单片机预先编写的程序或者示教的模式,机器人按照一定的规律进行击鼓,其击鼓的频率约为0.7-1.0秒/次,其中下行时间约为0.3-0.5秒,上行时间约为0.4-0.6秒,通过调节左右舵机输出不同的脉冲信号,可以实现交替击打(见图1.7,图1.8),交替极大能够实现整体机器人平均击鼓频率在0.3-0.5秒/次,而通过双臂仅能同时使整体机器人的击鼓频率在0.8-1.0秒/次左右。
而步进电机能够使机器人通过自身的转动,击打到不同位置的鼓,通过对步进电机的输出脉冲的个数进行控制,根据步矩角理论则能够使步进电机转动一定的角度,经过计算可以测出击打左侧两个鼓与击打右侧两个鼓需要转动的角度,即循环的次数,使步进电机转动要求的角度,并且实现击打的鼓的机械转换。
通过在预先在PIC单片机中离线编写好的程序,程序中进行对舵机与步进电机的脉冲信号输出,其中包括有舵机的异步控制方法、同步控制方法以及步进电机的控制;异步控制方法为单片机对两个舵机中的一个输出脉宽为2.4ms的高电平和20ms低电平而对另外一个电机输出脉宽为0.6ms的高电平和20ms(详见图1,13),循环一定次数之后交换两个电机的输出脉冲(详见图1.14),这样两个舵机将会出现一个左侧机械臂下行同时右侧机械臂上行,然后左侧机械臂上行右侧机械臂下行的交替击打;同步控制方法为PIC单片机对两个舵机同时输出脉宽为2.4ms的高电平和20ms的低电平(详见图1.15)循环一定次数之后同时再输出脉宽为0.6ms的高电平和20ms的低电平,这样两个舵机将会出现同时击打同时复位的情况。步进电机使用占空比为50%的高低电平调控,能够实现一定的步矩角的转动。
离线编程系统通过多次重复地不同地调用舵机异步控制、舵机同步控制、步进电机控制的子程序,能够实现机器人在步进电机一边转动一边舵机同步击打、步进电机一边转动一边舵机异步击打,步进电机停动同时舵机同步击打、步进电机停动同时舵机异步击打四种主要情况,通过交替、多次、重复、并排使用这些子程序和情况,能够使机器人整体在围绕三个鼓之间进行多次的来回往复击打,同时能够进行左右臂同时击打(见图1.7,图1.8)和左右臂交替击打的控制(见图1.9,图1.10)。
通过在声音传感子控制电路,通过可变电阻调整声音传感器的接收范围,可以识别现场的声音,机器人通过从子控制系统反馈的声音信息,能够实时输出相应的舵机同步控制脉冲信号,舵机同时击鼓,机器人跟随声音进行运动;通过触感子控制电路,可以识别人是否对示教的模拟鼓进行击打,如果是则输出相应的脉冲信号使一侧舵机进行跟随运动。
大白菜作为一个击鼓机器人,其主要功能并不局限与击鼓。我们创作这个机器人的意图是作为后续项目的前期制作,对后续项目中使用到的机械手进行理论的论证,以及对其进行部分制作,大白菜是后续项目中机械手的简化版本,我们也在大白菜上预留足够的空间以及增加电机的空间,用于日后在项目中对其进行改装与增加自由度。
(1)、基本结构:为了适应后续项目中的仿人式机械手而采用的单支双臂式结构,第一级机械臂与第二级机械臂也采用与人相似的设计;
(2)、基本功能:由于在比赛中强调可展示性,强调能够调动现场气氛的能力,因此简化了原有纪录位姿的功能,单纯采用单片机的控制而取消对电机转角、转速的测量,从而萌生使机械手进行击鼓动作的设计;
(3)、附加功能:包括声音控制与触感控制,则源于在最近结束的上海世博会中在上海企业联合馆中的等待区节目,第一个为由观众现场的拍掌,使场馆的LED灯根据现场拍掌的节奏而闪亮,第二个为由现场观众喊出相应的字母,机器人捡起对应的箱子,仿照这2个节目我们设计出通过现场观众拍掌的声音控制机器人以及通过现场击鼓的展示使机器人纪录示教人的击打信息并重现的附加功能。
(1)、作为一款参加机器人比赛展示类的机器人,该机械臂能够进行基本的击鼓动作;而在附加功能上,则通过不同的传感系统,记录示教人员的击鼓节奏,并在示教完成之后机器人能够重现该击鼓的动作以及节奏。
(2)、作为一种单支双臂式的机器人(机械臂),其仿人的设计用于作者对该理论的一种验证,通过对仿人的设计,使机械手能够模仿人的运动,而大白菜仅是作为对后期仿人机器人的设计与制作的一个前期步骤进行相关的研究与制作。
(3)、作为一个预留了大量改进空间的机器人,该机器人可以在多个方面进行不同的改进,包括预留增加自由度的位置,增加电机的位置,增加编码盘测量电机转角转速,缩减底座面积等多个改进方向,通过不同方面改进能够为日后研究机器人(机械臂)的运动、仿真、测量、多机器人协作等扩展功能提供了大量的现实数据、机器人实体和空间。
(1)作为大赛的参赛作品,本机器人的最大功能与意义在于能够实现最基本的击鼓功能。并在击鼓功能的基础上增加附加功能,实现以离线编程模式与示教模式控制机器人的功能。能够为观众带来对机器人的一种新的感受,一种新的乐趣,并且让更多观众参与到机器人当中。
(2)作为一种单支双臂式的机器人(机械臂),本机器人的意义在于能够通过舵机对其控制,实现击鼓的功能;同时,也是作为对该类机械臂的结构的一种新思考的实践与验证。
(3)作为一个预留大量改进空间的机器人,本机器人的意义在于为后续的设计与制作提供大量的现实数据与机器人实体,并且为日后的各个探究方面的选择提供了更多的参考数据资料,能够使日后项目组成员的后续探究设计更为完善与周详。
上述各种技术已经全部成熟及成型,只需要在掌握这些技术的基础上使用它们,并不需要通过自行设计技术来实现;同时并且通过使用这些技术,实现机器人的每个部分细节的处理,就能够最终完成机器人的整体制作与调试,整个机器人的制作中使用的技术都是可行的。
本机器人作为一款基本参加大赛的作品,在参赛的应用方面由于其拥有良好的展示性与娱乐性,该方面应用是可行的;另外,由于预留了大量的改进空间,即便是在比赛之后,需要进行多方面的改进,在未来,仍然能够使用这个机器人现有的本体作后续的研究,该方面应用同时可行。
将支架和臂简化为杆件,由于结构对称性,将两舵机旋转副、每个轴的旋转副和两臂各只作一个,另外由于有两个旋转副(两个轴所在的旋转副)被限制,因此简化结果如图3.1:
假设整体受轴2上扭矩而倾。