
启动。同时与启动按钮并联的接触器辅助常开触点闭合,松开SB2时,接触器线圈通过常开辅助触点继续保持通电,保证电动机连续运转。
2)依靠接触器自身常开辅助触点保持线圈通电的电路称为自锁或自保持电路。辅助常开触点称为自锁触点。
3)电动机需要停止时,按下停止按钮SB1,切断接触器KM线圈电路,KM常开触点与常开辅助触点均断开,切断电动机电源电路和控制电路,电动机停止运行。
由熔断器FU1、FU2分别实现主电路和控制电路的短路保护。为扩大保护范围,在电路中熔断器应安装在靠近电源侧,通常安装在电源开关下边。
由于熔断器具有反时限保护特性和分散性,难以实现电动机的长期过载保护,为此采用热继电器FR做为电动机的长期过载保护。当电动机长期过载时,串接在电动机定子电路中的双金属片过热变形,使串接在控制电路中的热继电器FR常闭触点打开,切断KM线圈电路,电动机停止运转,实现过载保护。
当电源电压由于某种原因严重欠压或失压时,接触器电磁吸力急剧下降或消失,衔铁释放,常开触点与自锁触点断开,电动机停止运转。而当电源电压恢复正常时,电动机不会自行启动运转,以避免发生事故。因此带有自锁的控制电路具有欠压与失压保护功能。
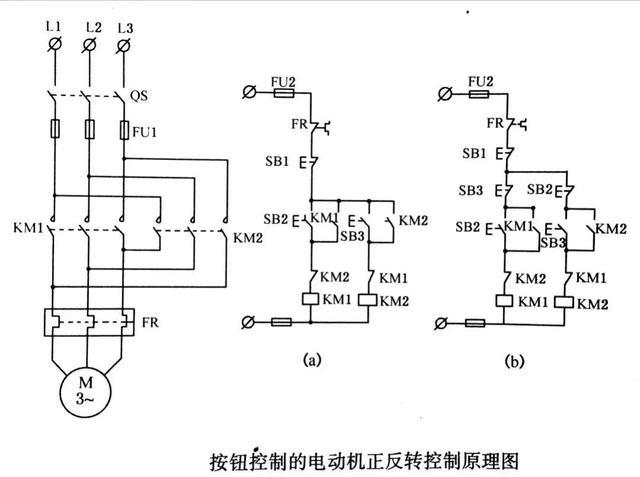
1、如图(a)所示,将KM1 、KM2常闭触点串接在对方线圈电路中,形成互相制约的控制,称为互锁或连锁控制。利用接触器或继电器常闭触点的互锁称为电气互锁。该电路欲使电动机由正转到反转或由反转到正转,必须先按下停止按钮,而后再反向启动。
2、要求频繁实现正反转的电动机可用图(b)所示控制电路控制,图(b)是在图(a)的基础上,将正转启动按钮SB2与反转起动按钮SB3的常闭触点串接在对方常开触点电路中。利用按钮常开、常闭触点的机械连锁,在电路中互相制约的接法称为机械互锁。这种具有电气、机械双重互锁的控制电路是常用的、可靠的电动机可逆控制电路。
1、丫-△降压启动是指正常运行时△形接法的电动机启动时把定子绕组接成丫形,加在每相定子绕组上的启动电压只有△形接法的跟1/√3,启动电流为△形接法1/3,起动转距也只有△形接法的1/3。电动机启动完成后,把定子绕组改接成△形,使电动机全压运行。这种降压启动方法只适用于轻载或空载下启动。
如上图,先合上电源开关QS,按下启动按钮SB1,KM得电并自锁,KM丫得电,电动机丫接降压启动。同时KM丫辅助常闭触点断开,使KM△在电动机丫接运行时处于断电状态。在按下SB1的同时,KT得电,延时一段时间后,KT常闭触点断开,KM丫断电释放,电动机丫接中性点断开。另一对KT常开触点闭合,KM△得电自锁,电动机△形连接运行。同时KM△常闭触点断开,KM丫、KT在电动机△形连接运行时处于断电状态,使电路更为可靠地工作。至此电动机丫-△降压启动结束,投入正常运行。停机时按下SB2即可。
1、反接制动是将运行中的电动机电源反接,以改变电动机定子绕组的电源相序,从而使定子绕组的旋转磁场方向相反,产生方向相反的制动力矩使转子迅速停转。为防止电动机停转后反转,一般在反接制动控制电路中,用速度继电器进行自动控制,保证当电动机的转速被制动到接近零时迅速切断电源,防止电动机反向旋转。
如下图,单向反接制动控制的主电路和正反转控制的主电路基本相同,只是增加了三个限流电阻R。下图中,KM1为正转运行接触器,KM2为反接制动接触器,速度继电器KA与电动机用虚线相连表示同轴。

1)启动时按下SB1,KM1得电并自锁,电动机启动。当转速升高到设定值时,速度继电器KA的常开触点闭合,因KM1常闭触点已断开,这时KM2线圈不通电,KA的接通仅为反接制动作准备。
2)停机时,按下停止按钮SB2,接触器KM1断电释放,电动机失电做惯性运转,同时KM1联锁触点闭合,接触器KM2得电吸合,电动机串入限流电阻进行反接制动。当转速下降到设定的较小值时,速度继电器KA的常开触点断开,接触器KM2断电释放,电动机脱离电源,制动过程结束。
3)由于反接制动时旋转磁场与转子的相对速度很高,感应电动势很大,所以转子电流比直接启动的电流还大,反接制动电流一般为电动机额定电流的10倍左右,故在主电路中串联电阻R限制反接制动电流。当电动机容量较小时,也可不串接限流电阻。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

如下:一、正向启动:1、合上空气开关QF接通三相电源2、按下正向启动按钮SB3,KM1通电吸合并自锁,主触头闭合接通
正转。与按钮SB2常触开点并联的KM1触点为自保触点。按起动按钮SB3,KM1断电释放,KM2吸合并
中的一种,由于其具有结构简单、价格低廉、坚固耐用、使用维护方便等优点,在实际生产中使用最广泛。本文从基本
接通电源时,电流通过定子线圈产生磁场,使得定子和转子之间产生相互作用的力。这个力的方向和大小取决于电流的方向和大小,从而决定了转子的转动方向和速度。