
在这个项目中,我们将学习L293D和L298N电机驱动器,以及在L293D和L298N的帮助下将直流电动机与连接。
当我们谈及控制机器人时,首先想到的是控制直流电动机。将直流电动机与微连接是机器人应用中非常重要的概念。通过将直流电动机与微连接,我们可以做很多事情,比如控制电动机的方向,控制电动机的速度。这篇文章描述了如何使用AT89C51(或任何8051微的变体)来控制直流电动机。
微引脚的最大输出电流在5V下是15mA。但是大多数直流电动机的功率要求是微所不能承受的,甚至电动机产生的反电动势也可能损坏微。
因此,直接将直流电动机连接到上是不可取的。因此,我们在直流电机和微之间使用电机驱动电路。
在这里,我们使用L293D和L298N电机驱动器IC来驱动直流电机。使用这些IC,我们可以同时驱动两个直流电动机。对于L293D电机驱动器,电机电源在4.5到36V之间变化,它提供的最大电流为600mA。对于L298N来说,电机电源最高为46V,可提供3A的电流。
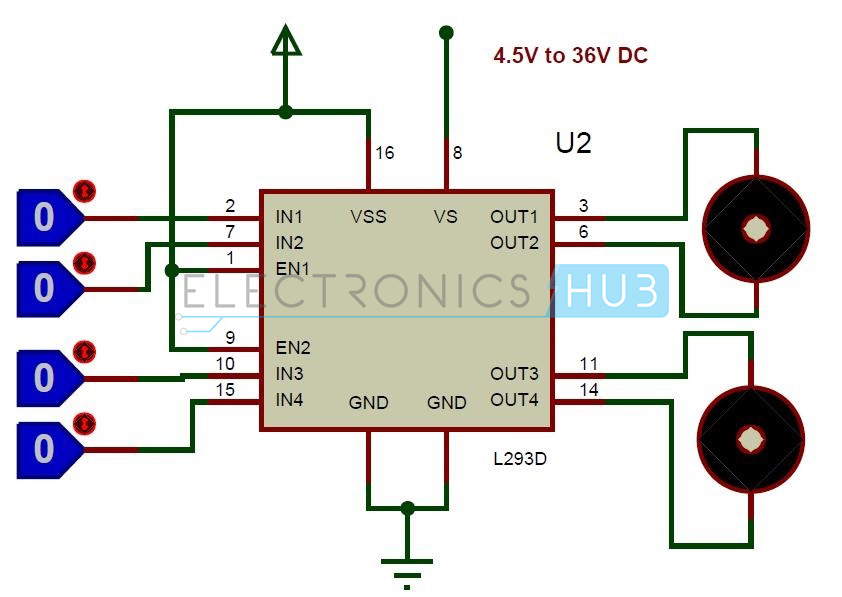
L293D是一个四重H桥电机驱动器,顾名思义,它用于驱动直流电机。这个IC的工作原理是基于H桥的概念。H桥是一个允许任何方向的电压来控制电机方向的电路。
L293D有4个输入引脚。电机方向取决于应用在这些引脚的逻辑输入。EN1和EN2必须是高电平才能驱动两个直流电动机。
L298N电机驱动模块是目前比较常用的驱动IC。L298N的额定电流和电压高于L293D电机驱动器。
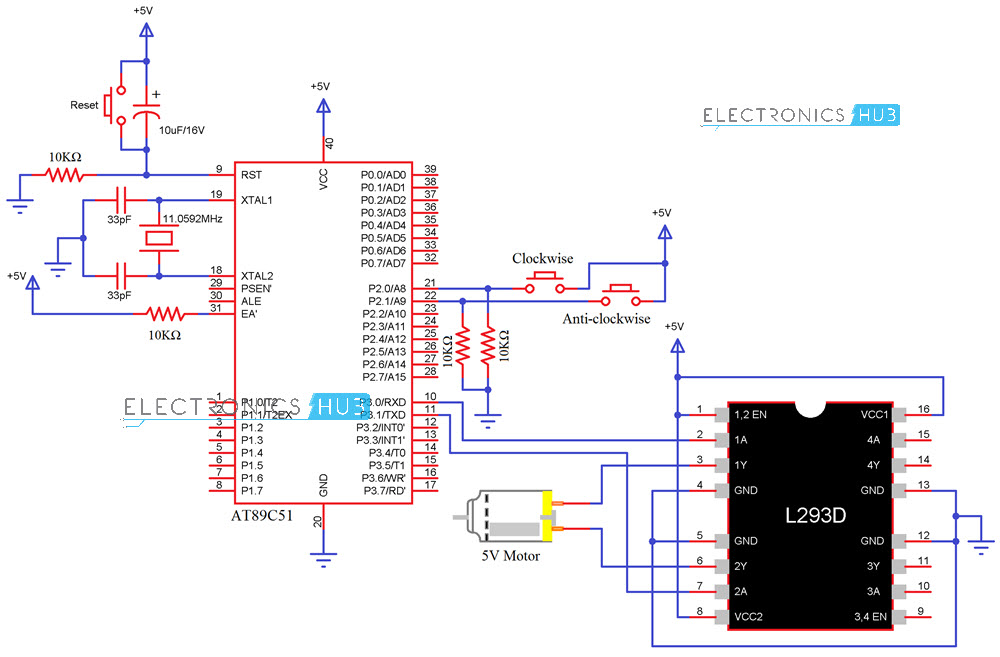
上述电路图中的主要部件是at89c51微和电机驱动器。在这里,电机驱动器的输入引脚IN1,IN2分别连接到P3.0和P3.1,以控制电机的方向。直流电机连接到L293D的输出端。EN1引脚连接到5V直流电以驱动电机。
开关被连接到微的P2.0和P2.1的下拉配置中。第一个开关使电机按顺时针方向旋转,第二个开关使电机按逆时针方向旋转。电机驱动器的第8和第16个引脚连接到+5V电源。
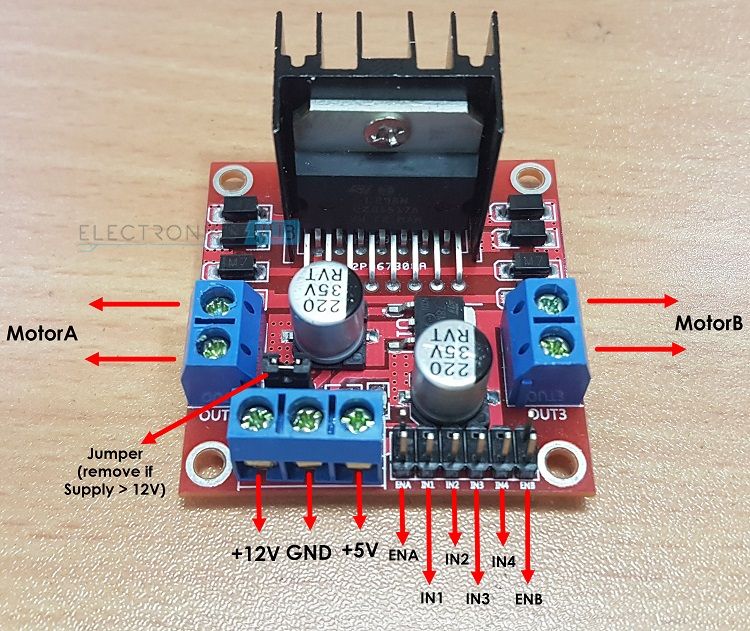
与上述电路类似,L298N电机驱动器的IN1和IN2连接到微的0端口P0.0和P0.1引脚。电机驱动模块的OUT1和OUT2端连接一个12V的直流电机。
现在检查第一个按钮是否被按下。如果按下了,则向P0.0发送逻辑1,向P0.1发送逻辑0。这将使马达向前进方向旋转。
接下来检查第二个按钮是否被按下。如果按下,则向P0.1发送逻辑1,向P0.0发送逻辑0,使电机反向转动。