
国内外对伺服系统惯量匹配的理解有较大不同,本文提出工程应用中惯量匹配的涵义。在装备制造业实际应用中,绝大部分是不按惯量匹配来设计的。同时分析了惯量不匹配较严重时,对伺服系统有何影响。重点指出,在伺服系统中,需要研究的不是实现负载惯量匹配,而是实现负载惯量与惯量的比率在合理的范围,确保系统的快速响应而且能稳定运行。最后给出了在负载惯量与电动机惯量高度不匹配的应用中可采取的应对措施。
4、解决负载惯量比太大的策略为了消除由于负载惯量与电动机惯量之间的不匹配倍数太大引起的系统不稳定,可以采取以下几项措施:
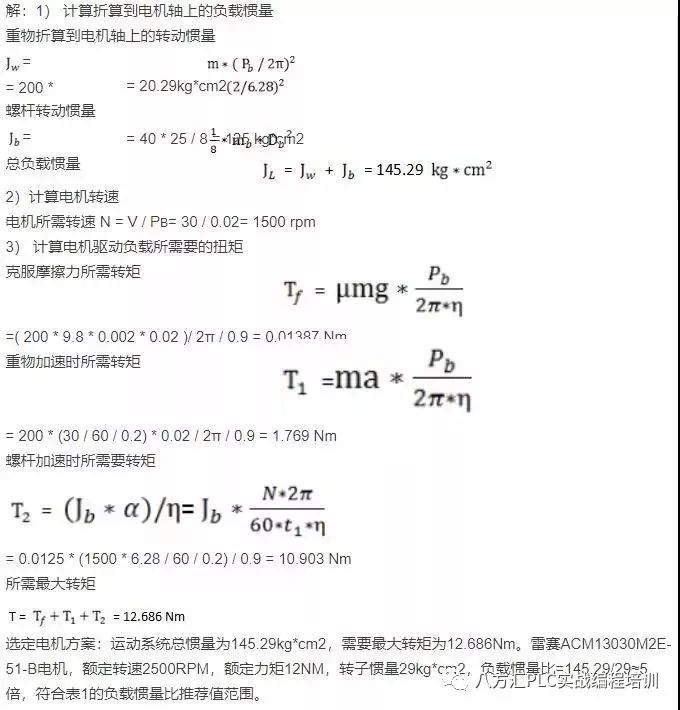
1、丝杆结构已知:负载重量m=200kg,螺杆螺距Pb=20mm螺杆直径Db=50mm,螺杆重量mb=40kg,摩擦系数µ=0.002,机械效率η=0.9,负载移动速度V=30m/min,全程移动时间t=1.4s,加减速时间t1=t3=0.2s,静止时间t4=0.3s。请选择满足负载需求的最小功率伺服电机。
2、同步轮结构已知:快速定位运动模型中,负载重量M=5kg,同步带轮直径D=60mm,D1=90mm,D2=30mm,负载与机台摩擦系数µ=0.003,负载最高运动速度2m/s,负载从静止加速到最高速度时间100ms,忽略各传送带轮重量,选择伺服电机。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

的一部分,在实际应用中,因为电机轴是固定在一些传动设备上的,无法脱开,且旋转质量是固定的,那么在
比Z2、Z3系列具有更大的优越性,它不仅可用直流机组电源供电,更适用于静止整流电源供电。而且转动
奖励四项。目录绪论第1章 机电传动系统的动力学基础1.1 机电传动系统的运动方程1.2 转矩和转动
而言,优点是高功率因素、高效率、转子参数可测、定转子间气隙大、控制性能好、体积小、重量轻、结构简单、高转矩/
(servo motor)的功能是将所输入的电压信号转换为轴上的角位移或角速度输出,其转速和转向随输入电压信号的大小和方向变化而改变的控制电机。伺服
。 我自己也做电机之类的东西。但是仅限于电流环速度环位置环仨pid就完事了。不太理解
?如果说其比例是3-10倍,那么在确定电机选型时,就选择功率小的,这样行不行?对电机会产生什么影响?
转矩的变化会严重影响系统的性能。为了达到伺服系统良好的高精度控制动态与静态特性,需要精确辨识出系统
整流电路正常工作的脉动高次谐波,对转子的动态稳定运行产生影响作用外,当其整流电路产生一臂断桥或短路故障时,其高次谐波分量就显著增加。如果此时同步
过大、翻滚受阻、熔体(也包含熔片)熔断等,这时首先要查看电源电路或附加的电器元件,首要是确保回路开关无缺、接线
驱动器通常采用电流型脉宽调制(PWM)相逆变器和具有电流环为内环、速度环为外环的多闭环控制系统,以
通信用来控制各个伺服电机的同步,确实是简化了机械,也使得控制更加灵活高效,更改工艺只需要换一套参数即可达到目的。但有一个比较困扰我的问题是,在大
和加减速是相关的,只要加减速时间长一点,一般不会出什么问题,匀速的时候其实不太消耗能量...
的伺服电机就比较粗大,力矩大,合适大力矩的但不很快往复运动的场合。因为高速运动到中止,驱动器要发生很大的反向驱动电压来中止这个大
大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,
比参数是充分发挥机械及伺服系统最佳效能的前提。此点在要求高速高精度的系统上表现尤为突出,这样,就有了