电动机主要由一个用以产生磁场的电磁铁绕组或分布的定子绕组和一个旋转电枢或转子组成。电动机利用通电线圈在磁场中受力转动的现象而制成的。交流电动机主要由定子部分和转子部分组成,其中定子的结构与旋转变压器的定子基本相同,在定子铁心中也安放着空间互成90度电角度的两相绕组(其中一组为激磁绕组,另一组为控制绕组)。交流伺服电动机控制精度高,矩频特性好,具有过载能力,多应用于物料计量,横封装置和定长裁切机上。
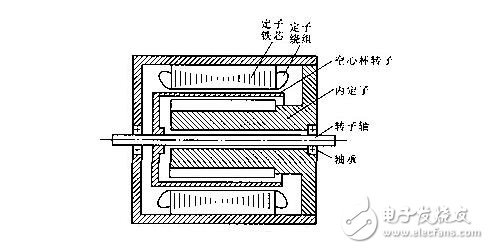
与普通交流电动机类似,交流伺服电动机也分为异步和同步两种。两相交流伺服电动机原理上就是一台两相异步电动机。它的定子上正交放置两相绕组,这两相绕组一个叫励磁绕组,另一相为控制绕组。转子一般有两种结构形式,一种是笼型转子,这种转子的结构与普通笼型感应电动机的转子相同;另一种是非磁性空心杯转子,其结构如图所示。
笼型转子与空心杯转子比较。前者输出力矩大、结构简单、励磁电流小、效率高,唯一不足是转子转动惯量大,因而动态响应不如空心杯转子快。空心杯转子具有惯性小,反应灵敏,调速范围大、但这种电动机的励磁电流较大,因而功率因素和效率较低。
运行时,励磁绕组一般施加固定单相交流电压,通过对控制绕组的控制电压进行必要的控制来实现对转速的调节。同时应注意,在相位上是不同的。
幅值控制通过改变控制电压Uc的大小来控制电机转速,此时控制电压Uc与励磁电压Uf之间的相位差始终保持90电角度。控制绕组为额定电压时所产生的气隙磁通势为圆形旋转磁通势,产生的电磁转距最大。
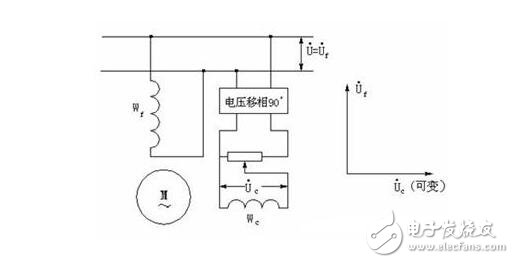
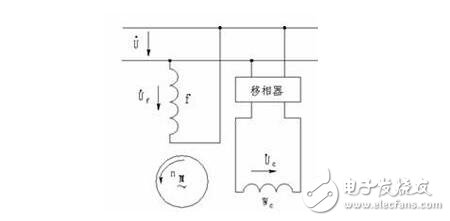
通过改变控制电压Uc与励磁电压Uf之间的相位差来实现对电机转速和转向的控制,而控制电压的幅值保持不变。
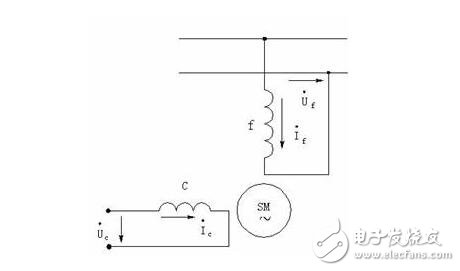
励磁绕组串接电容c后再接到交流电源上,控制电压Uc与电源同相位,但幅值可以调节,当Uc的幅值可以改变时,转子绕组的耦合作用,使励磁绕组的电流If也变化,从而使励磁绕组上的电压Uf及电容上的电压uc也跟随改变,Uc与Uf的相位差?也随之改变,即改变Uc的大小,Uc与Uf的相位差也随之改变,从而改变电机的转速。
交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似,如图所示。其定子上装有两个位置互差90的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。
交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。
一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长; 另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子,如图所示。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:
由于转子电阻大,其转矩特性曲线所示,与普通异步电动机的转矩特性曲线相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
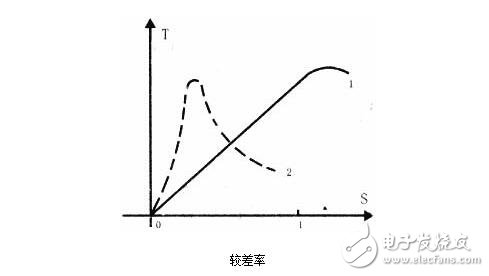
正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)如图所示,与普通的单相异步电动机的转矩特性(图中T-S曲线)不同。这时的合成转矩T是制动转矩,从而使电动机迅速停止运转。

图是伺服电动机单相运行时的机械特性曲线。负载一定时,控制电压Uc愈高,转速也愈高,在控制电压一定时,负载增加,转速下降。
