学等诸多学科为一体的高度集成的新型医疗器械,整体运行需要多项技术的协同。其中,系统软件中的图像重构、空间配准和定位控制等,是手术机器人最为核心的部分;而装置如机械臂的设计则需要与手术具体情况相结合,反复实验;人机交互的主机必须充分考虑医生习惯和临床应用场景。
手术机器人是20世纪80年代以来,伴随着微创外科手术的发展而逐步出现并且发展起来的高端医疗设备,主要用于以微创的手段来消除手术造成的大面积创伤对患者的不利影响,进而达到减少患者痛苦和加快术后恢复速度等目的,同时还可以降低常规手术中因医生手部震颤等造成的不可控的手术风险。此外,对于对精度要求很高的骨科、神经外科及口腔科等外科手术,手术机器人还具有精准定位、手术规划、精准成像等功能,并且能大幅减少手术中医生所受辐射伤害和感染风险。

从工作原理看,大体上手术机器人通过感知、分析和行动三个步骤来执行辅助手术的工作。首先机器人通过传感器系统(如视觉、触觉、温度等)感知外部环境信息。然后机器人通过对各类信息进行分析、学习,并给出下一步的动作指令。最后,驱动系统根据分析指令完成具体动作并实施反馈状态信息给控制系统。
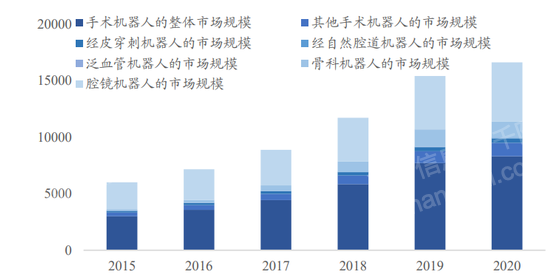
全球手术机器人市场增长快速,腔镜机器人占比最大。全球手术机器人市场规模从 2015 年 30.10 亿美元快及普外科手术等。据数据统计,其市场规模从2015年23.84 亿美元上升至2020年52.55亿美元,占比 63.15%。其他类型手术机器人中,骨科机器人这一市场规模增长也很迅速,在2015 年仅有 1.38 亿美元,而经皮穿刺机器人市场规模有 1.58 亿美元,到了 2020年骨科机器人增长至 13.94 亿美元超过经皮穿刺机器人3.80亿美元规模,其需求受人口老龄化和关节炎患病率的不断提升带动,发展潜力巨大。
从涉及的学科上看,手术机器人是集临床医学、生物力学、机械学、计算机科学、微电子学等诸多学科为一体的新型医疗器械。通过其清晰的成像系统和灵活的机械臂,以微创的手术形式,协助医生实施复杂的外科手术,完成术中定位、切断、穿刺、止血、缝合等操作。
从自动化水平上看,现阶段的手术机器人仍处于以辅助医生手术为主要功能的半自动化阶段,已应用于普腹外科、泌尿外科、心血管外科、胸心外科、妇科、骨科、神经外科、口腔科等多个领域。
按照手术部位机器人产品可分为腹腔镜手术机器人、骨科手术机器人、神经外科手术机器人、血管介入手术机器人和口腔手术机器人等;按照产品功能则可分为操作类手术机器人和定位类手术机器人。

腹腔镜手术机器人广泛应用于外科手术中具有手术创口小、操作精度高、灵活性强、重复性好以及不受疲劳和情绪等生理因素影响等优点。当前在美国约90%的前列腺切除手术和约80%子宫癌手术均由手术机器人辅助完成,是当前应用范围最广、市场接受度最高的手术机器人。
从关键组成部件上看,主要包括医生控制系统,3D成像视频影像平台,以及由机械臂,摄像臂和手术器械组成的移动平台。3D成像视频影像平台可以为医生提供具有沉浸感且清晰细致的解剖组织结构图像提升手术的视觉感。机械臂可实现抓持、钳夹、缝合等各项手术操作,并且比人手的活动自由度更广。实施手术时,主刀医师不与病人直接接触,而是通过三维视觉系统和动作定标系统操作控制,并通过机械臂以及手术器械完成医生的技术动作和手术操作。
从适应症上看,可应用于心脏外科、普通外科、泌尿外科、胸外科、肝胆胰外科、胃肠外科、妇科等相关的微创手术。
骨科手术机器人可应用于膝关节手术和髋关节手术和脊柱外科手术中。传统的骨科手术存在手术风险高、定位困难、植入精度低、复杂术式难普及、智能设备匮乏、手术创伤大、并发症多等问题。而骨科手术机器人可利用术前的三维CT影像对病灶进行准确测量,根据病灶大小及植入假体形状进行术中组织的精确判断和操作。
从关键组成部件上看,主要包括机械系统、影像系统和计算机系统。其中,机械系统中的机械臂是手术的核心执行模块,末端的反馈结构具有视觉、力觉、触觉等模态。影像系统能够给施术医生提供更加清晰的影像资料,帮助患处定位和导航。计算机系统是骨科机器人的中枢,主要辅助医生进行手术方案设计和实现路径规划,帮助医生进行手术,此外还能对手术设备进行管理,包括对机械系统各部位的损耗情况进行自检和智能评估。
神经外科手术主要指针对脑部、脊髓和神经的手术,在操作上具有手术空间小、定位困难等难点。神经外科手术机器人主要通过对脑部病灶位置精确的空间定位,辅助医生夹持和固定手术器械等,并完成如活检手术、深脑刺激、经颅磁刺激、立体定向脑电图、神经内窥手术等的神经外科手术。
从关键组成部件上看,主要包括术前规划软件、导航定向系统、机器人辅助器械定位和操作系统。其中,手术规划软件是神经外科手术机器人的核心技术,帮助医生进行手术方案的规划,在手术前获得患者病灶处的图像,结合医生的解剖学和病理学知识,进行包括手术方法,手术流程,手术切口与路径等方面的规划。导航定向系统是通过以CT/MRI等影像设备扫描图像建立的三维模型作为参考,对手术进行规划与虚拟仿真操作。机器人机械结构系统是机器人系统的执行和操作单元,要求机器人末端的误差尽可能小,同时确保各个关节能够按照规划的轨迹进行运动。
从适应症上看,神经外科手术机器人可应用于包括中枢神经系统炎症疾病、帕金森病和癫痫病在内的神经系统疾病、脑血管病和脑梗死,应用市场广阔。
血管介入机器人主要是在血管介入手术(主要是心血管介入手术)中实施导管的推进和导航,在术前和术中依据影像数据构建病患血管的三维形态图和分析血管交叉口、弯道、弹性、斑块的特征,从而实现在手术过程中对手术器械的跟踪和定位,有助于大幅提升手术的精准度,同时降低医务人员的劳动强度,也在一定程度上减少了手术对于医生个人技术熟练度的依赖。
从关键组成部件上看,主要包括图像导航系统、机械装置与控制系统和力反馈系统等。其中,图像导航系统能够集成显示导丝和血管,并通过三维血管模型构建确保手术安全性。机械装置与控制系统负责导管的推进与旋转运动,由主刀医生操作和操控。力反馈系统可以准确地感受到导丝在血管中的受力情况,确保在引导图像不够直观的情况下也可以保证导丝的安全介入。
机器人的智能化、高精准度等特点,使其在口腔医学领域的应用具有更加独特优势,目前机器人在口腔医学应用的领域主要包括以下几个:
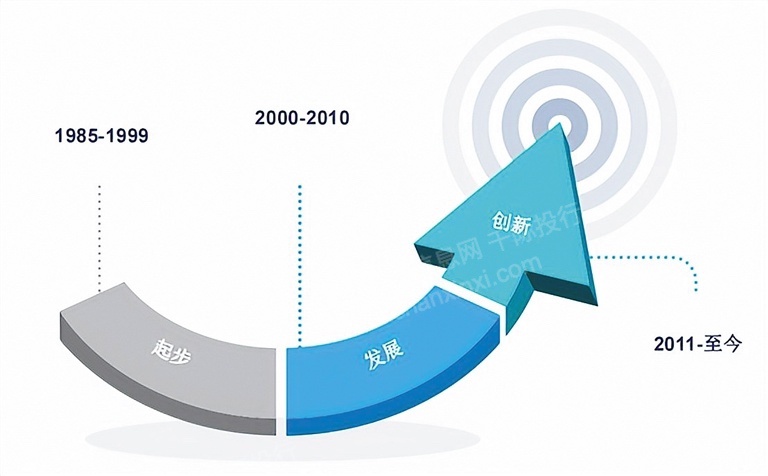
手术机器人发展脉络:从1985年手术机器人发展起步开始至今30余年,大致可以分为三个阶段,1985年到1999年为起步阶段,2000年到2010年为发展阶段,从2011年至今是创新阶段。
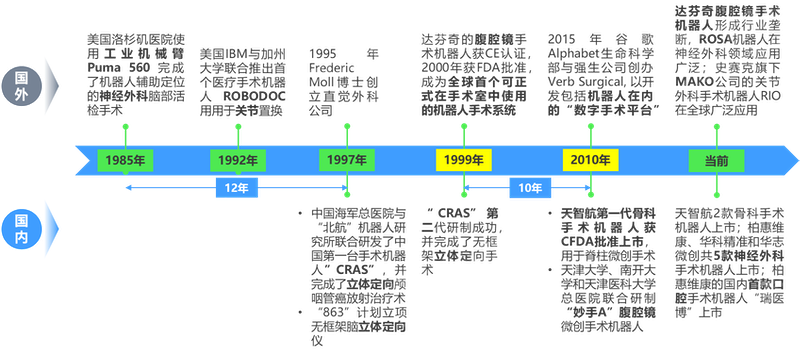
机器人在外科手术中的应用起源于1985年的美国,洛杉矶医院的医生使用工业机械臂Puma 560 完成了全球首个机器人辅助的外科手术——机器人辅助定位的神经外科脑部活检手术。
80年代末,斯坦福大学研究院是最早进行外科手术机器人研发的机构,此后在1992年由IT公司IBM和加州大合推出了全球首个医疗手术机器人ROBODOC用于骨科手术中的关节置换。到1995年,出身于斯坦福大学研究院的FredericMoll博士创立了当今全球最为出名的医疗手术机器人公司——直觉外科公司(Intuitive Surgical),并开启了手术机器人领域的商业化道路。而此时的中国才刚刚开始在手术机器人领域的探索,研发制造进度较美国滞后了十年以上。1999年全球首个可正式应用于手术室中的手术机器人系统达芬奇手术机器人率先在欧洲获批上市,这是一款由美国直觉外科公司研发制造的腹腔镜手术机器人。
2010年我国上市了首款国产手术机器人,是由天智航研发制造的骨科手术机器人,从产品上市角度看,我国同样滞后于美国十年,但是在2010年以后,发展进程明显加快,到目前为止,已上市的国产手术机器人产品数量已达9个,包含2个骨科手术机器人,5个神经外科手术机器人和1个口腔手术机器人。我国手术机器人是以“定位类”机器人为开端,在“操作类”机器人的推广中走向大众,并逐步在更细分的领域中进化升级。
从行业发展进程上看,美国手术机器人的发展大体经历了3个阶段,从以高校或医院牵头研究,到企业与高校或医院联合开发,最后到企业主导产业化的历程。中国的发展进程与之类似,但是当前正处于第2到第3阶段的过渡阶段中,尚未进入完全的企业主导产业化阶段,行业整体对高校和医院技术依赖还比较强。当前我国整体以“产学研医”的创新研发模式为基础,形成了以领先企业产品上市和技术升级加速为引领,中小创新企业积极布局,并以外部融资为基础加速技术探索和产品储备的国产品牌的行业竞争格局。
手术机器人的产业链主要分为上游的原材料、核心零部件,中游的机身组装、系统集成和软件开发等环节,以及下游的终端使用环节。其中技术壁垒最高的产业链环节是处于产业链上游的三大核心零部件,即伺服电系统、减速器和,其市场主要由美国、德国和日本垄断,我国仅能够在领域实现自产。此外,从产品附加值上看,在机器人成本构成中,减速器、伺服系统、分别占35%、20%、15%,三大核心零部件的成本占比达到了70%。
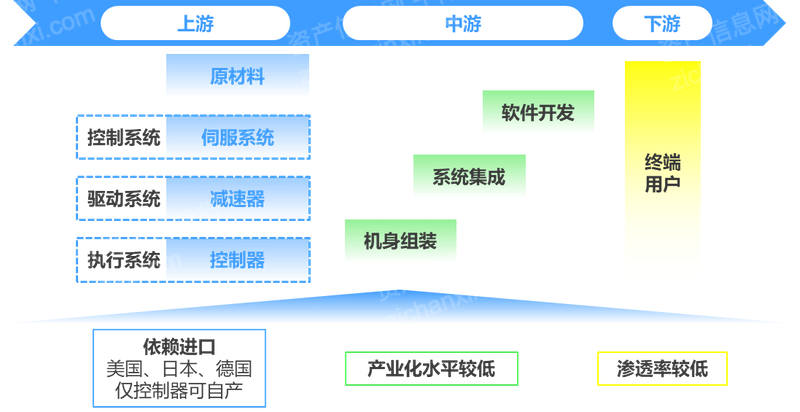
手术机器人的上游主要是制造手术机器人的原材料,以及内部控制系统、驱动系统和执行系统的核心伺服系统、减速器、。然而我国手术机器人行业上游的三大核心零部件仅有可实现自产,伺服系统和仍以进口为主,成为手术机器人领域的“卡脖子环节”,并且短时间内仍然难以与国际顶尖企业比肩,同时这也是整个机器人行业最难攻克的技术难题。
伺服系统由伺服电机编码器和伺服驱动组成,主要为机器人的运动提供动力并完成机器人运动。伺服系统是一种以机械位置或角度作为控制对象的自动控制系统,除了可以进行速度与转矩控制外,还可以进行精确、快速、稳定的位置控制。
伺服电机主要布置于机器人运动关节之中,在手术机器人中主要以直流电机为主,其优点是功率更大;编码器安装于电机输出轴,与电机同步旋转,转动的同时将信号传达至驱动器;驱动器根据信号判断伺服电机的转向、转速、位置是否正确,然后进行修正调。
