大家对电机的认识可能就是高中课本里的交变电流章节的例子,电刷+外磁场+通电线圈。这是最经典的有刷电机。但是今天咱们谈论的是另一种更高效、性能更好的电机——无刷电机。
如图是无刷电机的等效模型。内外两个灰色的轮子一个是定子,一个是转子(具体哪个是定子哪个是转子根据电机类型有所不同)。此时转子和定子是完全重合在一起的,没有扭矩的存在。
所有的电机扭矩的大小正比于内外两个磁场的叉乘,即图中围出的平行四边形的面积。可见两个磁场重合时,叉乘为0,扭矩也为0,和之前的直观认知相符合。显然,当两个磁场呈90度时,平行四边形面积最大,此时的扭矩也最大。
实际的无刷直流电机(BLDC)或永磁同步电机(PMSM)通常用三相****交流绕组线圈充当定子,永磁体作为转子。我们希望通过电路控制定子绕组的输出,使之能够能产生一个大小尽可能恒定的旋转磁场,让转子和定子的扭矩达到最大值。
FOC(Field-Oriented Control),即磁场定向控制,也称矢量变频,是近几年较为主流的高效控制无刷直流电机(BLDC)和永磁同步电机(PMSM)的选择。
要得到一个恒定大小的旋转磁场很容易。当今主流的BLDC和PMSM电机定子均采用的是三相绕组,即各个绕组上的交流信号就是相位互差120°的信号。根据三相电机的结构,我们可以将一个恒定大小的旋转电压矢量分解到相位互差120°的方向上。如下图
从上图可以看到,只要控制电机的三个绕组产生相位互差120°的大小随着时间按正弦规律变化的3个分矢量,就可以得到我们想要的旋转磁场
然而,在实际的电机控制中,由于齿槽效应、磁通畸变等因素,电机的转矩会产生大量的波动,需要不断地对控制信号做出修正。但是当电机转速较高时,电流环必须跟踪频率不断提高的弦波信号,而且还要克服振幅和频率不断提高的电机反电动势。在这样的情况下,想要直接通过维持三路正弦信号得到旋转平滑、大小稳定并且一直保持和转子磁场方向垂直的磁场难以实现。
我们重新回到一开始的磁场叉乘。我们发现电机的转矩只与 平行于内磁场方向(称d轴)的磁场分量 和 垂直于内磁场方向的分量(称q轴)有关(如下图)。
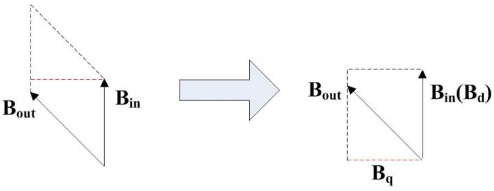
现在对于电机扭矩大小的控制就变成了q轴和d轴大小乘积的控制。在电机中,d轴上内磁场的大小是永磁铁产生的,是恒定的;我们对外磁场的控制实质上变成了q轴上的分量大小控制+外磁场的角度。
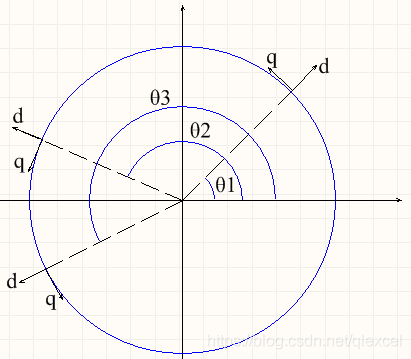
如上图所示,如果转子的电角度在θ1,则我们就要在θ1处产生d、q轴大小的外磁场。如果转子的电角度在θ2,则我们就要在θ2处产生d、q轴大小的外磁场。
我们把角度θ1的情况单独提出来,把它移到原点去,然后把x、y轴重命名为α,β。根据空间矢量的关系,我们可以把q、d轴的大小分解到α,β轴上。这个过程就是所谓的“反帕克(Park)变换”。
绕了这么多弯弯,我们终于让电机转起来了。大家看到这里可能会说:“这是在折腾啥?(╬ ̄皿 ̄)不还是最后转成三个相差120°的正弦信号了吗?”
我们先测量电机的3相电流。电机的信号如下图所示(把相差120°的电信号看成同一个旋转向量在三个相差120°坐标轴上的投影)
根据我们之前的理论,我们需要的是两个互差90°的磁场。这里咱们又使用一个变换,把三个分磁场变换成α、β方向上的两个分磁场。这个叫做“克拉克(Clarke)变换”。
再把α,β轴上的值映射到旋转的q、d轴上,得到此时电机实际的d值和p值。这是之前反Park变换的逆过程,“帕克Park变换”
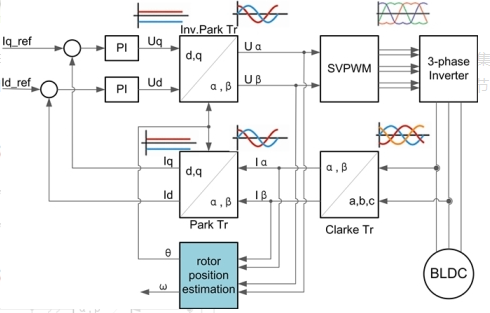
我们把测量到的d、q轴值与我们设定的值做对比,通过PI算法消除误差,再重新通过之前的流程输入到SVPWM中,这就完成了一个闭环控制,可以对定子磁场的做动态修正了。因为控制d、q是在控制电流值,所以这个环路叫做电流环。
测量q、d轴的值:测量电机的相电流(测量两相,通过Ia+Ib+Ic=0得到第三相),然后通过Clarke变换得到Iα和Iβ,然后通过park变换得到q、d轴的值。
把测量到的d、q轴值与我们设定的d0、q0做对比,进行PID处理。(目标是让测量值与我们的设定值相同)
调整d、q值输出,回到1.除了电流环之外,由于d、q是直流信号, 我们通过d、q也可以更轻松地控制电机的转速和旋转位置。比如设定电机转速为1000Rpmin,编码器测得当前转速为500,同样用PID算法增大q值就可以加大扭矩,让电机的速度加快了。这个环路叫速度环,即在电流环的外面加一层,改变q、d设定值来改变速度。当然我们也可以加上位置环,通过对速度的积分可以得到电机的位置,计算位置误差进行PID调整。看ヾ(✿゚▽゚)ノ,我们把对三相交流正弦信号的控制转换成了对直流信号d,p的控制,这样优势就出来了,很nice~
除了FOC之外,还有其他控制电机的方法,比如梯形波式控制、弦波控制等。详细介绍可以参考这篇文章
简单概括,弦波式换相能让电机在低速下运转平稳,但在高速运转下效率却大大降低;而梯形波式换相在电机高速运转下工作比较正常,但在电机低速运转下,会产生力矩的波动。因此,矢量控制是对无刷电机的最佳控制方式~
直流无刷电机怎么用 直流无刷电机的八个使用常识,包括拆卸前的准备工作,电机解体的现场环境,选用合适电压的兆欧表测试电机绝缘电阻等方法说明如下: 1、在拆卸前,要用压缩空气吹净电机表面灰尘,并将表面污垢擦拭干净。 2、选择电机解体的工作地点,清理现场环境。 3、熟悉电机结构特点和检修技术要求。 4、准备好解体所需工具(包括专用工具)和设备。 5、为了进一步了解直流无刷电机运行中的缺陷,有条件时可在拆卸前做一次检查试验。 为此,将电机带上负载试转,详细检查电机各部分温度、声音、振动等情况,并测试电压、电流、转速等,然后再断开负载,单独做一次空载检查试验,测出空载电流和空载损耗,做好记录。 6、切断电
驱动原理图 /
作为成孔作业施工机械之一的旋挖钻机,目前广泛的应用在大型的工程上面。旋挖钻机的功率相当比较大,而承受这个大的功率作用一个非常关键 仪器 上,也就是扭矩 传感器 。旋挖钻机上的扭矩传感器一般量程都在120到400千牛米以上。 旋挖钻机上最有份量仪器就是扭矩传感器,一般国内的旋挖钻机最大扭矩力可以达到360千牛米。国外的旋挖钻机一般都设有摇管装置、由两个或三个驱动的大扭矩动力头、液压系统采用恒功率变量自动控制、自锁互扣钻杆、发动机和液压系统自动监测或是报警系统、钻孔深度显示、钻桅自动测斜纠偏装置等,同时配有各种保险装置,例如如防止带负载起动,卷扬机超高限位等,但各家公司的旋挖钻机都有自己的技术特点。 旋
在工农业以及航空航天等领域,电机得到了广泛的应用。在实际应用时,电机的转速控制显得尤为重要。 直流电机具有优良的性能,调速方便、调速范围宽、低速性能好、运行平稳,可实现频繁的无级快速起动、制动和反转,被广泛应用于工业和民用领域。传统的直流电机采取电刷和换相器,以机械方式进行换相从面导致电机容量有限、噪声大、容易产生火花、无线电干扰、可靠性差等缺点。而直流无刷电机使用电子换相器取代了电刷和换相器,从而解决了上述问题,同时又保持了直流电机的优点。 随着电子技术的发展,电子系统朝着集成化的方向发展。NI公司推出的CompactRIO是一种小巧而坚固的工业化控制和采集系统,它是面向嵌入式控制应用的高性能和高可靠性可编
根据驱动系统的不同,无刷电机具有不同的电流控制方法。此外,为了控制转速和产生的扭矩,需要控制电机电流的大小。在这里,我们将解释控制电机电流的 PWM 方法。 电流控制方式 称为PWM(脉冲宽度调制)的电气控制系统用作施加到电机绕组的电压的控制方法。PWM 控制是一种通过反复打开和关闭电路中的开关元件并产生脉冲状电压来控制输出电压的方法。 图 3.12 显示了直流电机的 PWM 控制电路模型。图 3.13 显示了 ON 阶段脉冲宽度变化(调制)时的电压波形和电流波形。 调制脉冲宽度并改变 ON/OFF 开关元件的占空比可控制平均电压。 此时,电感使电流滞后于增加的电压,当取消施加电压时,电流逐渐减小。 3.31调制方
控制方法 /
: 该文以C8051F020为例介绍了C8051F单片机在无刷直流电机转速控制中的应用、实现方法、硬件结构及软件结构等。 : 单片机、无刷直流电机、转速控制 : ,configuration of software and hardware. : MCU,direct current and brushless motor, rotate speed Control The article introduces application of C8051F020 in rotate speed Control of direct current and brushless motor, realization
在设计使用电机的设备时,当然需要选择最适合所需工作的电机。 本文将对有刷电机、步进电机及无刷电机的特点、性能和特性进行比较,希望能够成为大家在选择电机时的参考。 但是,由于同一类别的电机中又包括多种规格,因此请仅用作参考。最终还是需要通过各电机的技术规格书来确认详细信息。 小型电机的特点 下表中汇总了步进电机、有刷电机和无刷电机的特点。 步进电机 有刷电机 无刷电机 旋转方法 通过驱动电路按决定电枢绕组各相(有两相、三相、五相)的顺序励磁。 通过电刷和换向器的滑动接触式整流机构,切换电枢电流。 通过用磁极位置传感器和半导体开关代替电刷和换向器的功能来实现无刷。 驱动电路 需要 不需要 需要 转矩 转矩比较大。(
有什么区别 /
无刷电机的好处 无刷电机相比有刷电机,具有以下好处: 高效率:由于无刷电机没有摩擦产生,效率更高。无刷电机的效率可以高达90%以上,而有刷电机的效率通常只有70%左右。 更长寿命:无刷电机的转子和电刷不接触,所以无刷电机的寿命更长。相比之下,有刷电机的电刷会消耗,会导致电机寿命变短。 更精准的控制:无刷电机是通过电子控制,因此控制更精准,可以获得更平滑的转速。相比之下,有刷电机的转速可能会有明显的抖动和波动。 无电刷消耗:有刷电机的电刷会消耗,需要定期更换,而无刷电机则没有这个问题。 较低的噪音:由于无刷电机的转子和电刷不接触,所以噪音较小,运行更平稳。 需要注意的是,无刷电机也有一些缺。
